
Si nos ponemos a hacer memoria, hace algunas décadas la manufactura de productos de calidad debía llevarse a cabo de manera manual. Miles de manos obreras tras líneas de producción trabajando durante largas jornadas. Esto tenía dos desventajas importantes, las cuales eran: mayor tiempo para llegar al producto final y sobre todo fallas de precisión humana: debido al cansancio y distracción normales que cualquier humano pueda tener.
Ahora bien, si existe un sector el cual se ha visto beneficiado en los últimos años de los avances tecnológicos, han sido aquellas empresas que evolucionaron sus procesos de producción industrial. Y todo ello, gracias a los innovadores robots industriales.

Esta definición, ligeramente modificada, ha sido adoptada por la Organización Internacional de Estándares (ISO) que define al robot industrial como: "Manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular materias, piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas".
En resumen, los robots industriales son máquinas de manipulación que sirven para realizar muchas funciones y se pueden reprogramar las veces que queramos. Estos pueden ser controlados por un mismo operario humano cualificado, o simplemente por un control mediante algún dispositivo lógico reprogramable.
¿Te gustaría conocer cuales son los tipos de robots mas comunes ?

La topología cartesiana es la más extendida en los robots utilizados en la industria. El robot cartesiano es el robot más simple, pudiendo ser fácilmente comprendido por el usuario dado que, como su nombre indica, el esquema de su movimiento se basa en el sistema de ejes cartesianos X-Y-Z . Por otra parte, también es el robot más fácil de concebir y fabricar porque su producción es tan sencilla como ir acoplando múltiples actuadores lineales unos sobre otros perpendicularmente. Indudablemente, también es una de las construcciones más económicas. El acrónimo de SCARA es “Selective Compilant Assembly Robot Arm”, que en castellano significa “Brazo robótico de montaje selectivamente adaptable”. Se diferencia por ser un robot de pequeñas dimensiones que ha sido diseñado para realizar trabajos repetitivos a gran velocidad y con una alta precisión. Los robots Scara son un caso de éxito en la historia de la automatización. Sus cuatro grados de libertad ofrecen mucha más rapidez, precisión y posibilidades que los manipuladores cartesianos de 3 ejes usados tradicionalmente para la manipulación.
El acrónimo de SCARA es “Selective Compilant Assembly Robot Arm”, que en castellano significa “Brazo robótico de montaje selectivamente adaptable”. Se diferencia por ser un robot de pequeñas dimensiones que ha sido diseñado para realizar trabajos repetitivos a gran velocidad y con una alta precisión. Los robots Scara son un caso de éxito en la historia de la automatización. Sus cuatro grados de libertad ofrecen mucha más rapidez, precisión y posibilidades que los manipuladores cartesianos de 3 ejes usados tradicionalmente para la manipulación.Robot Delta
Los robots Delta son un tipo de robot paralelo, el cual está formado por un conjunto de bielas; cada una de ellas dispone de un sistema de actuación independiente que suele estar conformado por un servomotor y un reductor.
El efector final (pieza final) está unido a una plataforma móvil por, al menos, dos bielas; esto permite que los robots Deltas canalicen mejor la energía de los servomotores con el fin de lograr mayor velocidad en los movimientos e incrementar la capacidad de carga del efector.
Los Robots Delta tienen la capacidad de suministrar la velocidad y aceleración requeridas sobre el efector final mediante un sistema de brazos, los cuales sirven de interfaz entre la plataforma móvil y una plataforma fija llamada base. Este tipo de construcción proporciona mayor rigidez y repetibilidad al robot.
El robot con brazo articulado se basa en el principio del brazo humano. Está compuesto por una serie de articulaciones, cada una de las cuales le confiere un grado de libertad —de 4 a 7 DOF—. Una estructura de tal flexibilidad le permite alcanzar cualquier posición y orientación dentro del volumen de trabajo y evitar los obstáculos. Es ampliamente usado en la industria y uno de los mas comunes de encontrar.
Ahora bien, si existe un sector el cual se ha visto beneficiado en los últimos años de los avances tecnológicos, han sido aquellas empresas que evolucionaron sus procesos de producción industrial. Y todo ello, gracias a los innovadores robots industriales.
¿Qué es un Robot Industrial?
La definición más comúnmente aceptada posiblemente sea la de la Asociación de Industrias Robóticas (RIA), según la cual dice que: "Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas".Esta definición, ligeramente modificada, ha sido adoptada por la Organización Internacional de Estándares (ISO) que define al robot industrial como: "Manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular materias, piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas".
En resumen, los robots industriales son máquinas de manipulación que sirven para realizar muchas funciones y se pueden reprogramar las veces que queramos. Estos pueden ser controlados por un mismo operario humano cualificado, o simplemente por un control mediante algún dispositivo lógico reprogramable.
¿Te gustaría conocer cuales son los tipos de robots mas comunes ?
Tipos de Robots Industriales
En la industria de hoy en día podemos encontrar muchos tipos de Robots. Cada uno sirve para satisfacer una necesidad en especial. Veamos los principales.Robot Cartesiano
La topología cartesiana es la más extendida en los robots utilizados en la industria. El robot cartesiano es el robot más simple, pudiendo ser fácilmente comprendido por el usuario dado que, como su nombre indica, el esquema de su movimiento se basa en el sistema de ejes cartesianos X-Y-Z . Por otra parte, también es el robot más fácil de concebir y fabricar porque su producción es tan sencilla como ir acoplando múltiples actuadores lineales unos sobre otros perpendicularmente. Indudablemente, también es una de las construcciones más económicas.
Robot SCARA
Robot Delta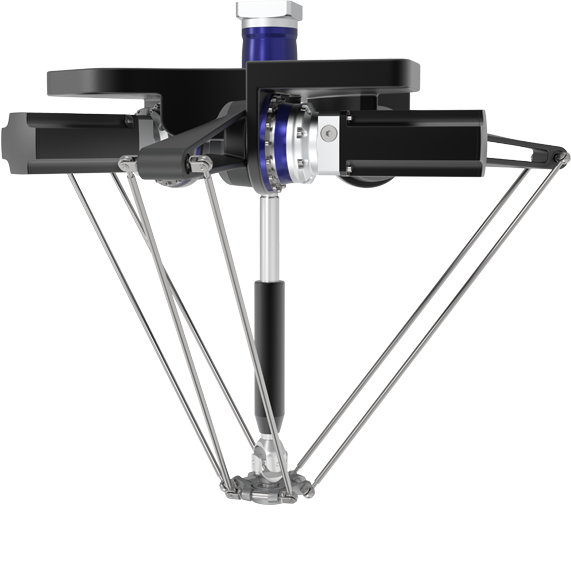
Los robots Delta son un tipo de robot paralelo, el cual está formado por un conjunto de bielas; cada una de ellas dispone de un sistema de actuación independiente que suele estar conformado por un servomotor y un reductor.El efector final (pieza final) está unido a una plataforma móvil por, al menos, dos bielas; esto permite que los robots Deltas canalicen mejor la energía de los servomotores con el fin de lograr mayor velocidad en los movimientos e incrementar la capacidad de carga del efector.
Los Robots Delta tienen la capacidad de suministrar la velocidad y aceleración requeridas sobre el efector final mediante un sistema de brazos, los cuales sirven de interfaz entre la plataforma móvil y una plataforma fija llamada base. Este tipo de construcción proporciona mayor rigidez y repetibilidad al robot.
Robot de Brazo Articulado
El robot con brazo articulado se basa en el principio del brazo humano. Está compuesto por una serie de articulaciones, cada una de las cuales le confiere un grado de libertad —de 4 a 7 DOF—. Una estructura de tal flexibilidad le permite alcanzar cualquier posición y orientación dentro del volumen de trabajo y evitar los obstáculos. Es ampliamente usado en la industria y uno de los mas comunes de encontrar.
Cobot o Robot Colaborativo
 Un robot colaborativo (también llamado cobot) es aquel que está hecho y programado para ejecutar labores con la ayuda de un colaborador humano. Ambos tienen un rol protagónico en la tarea que efectuaran juntos. El humano por su parte será quien aportará el ingenio, destreza y capacidad de adaptación mientras que el cobot será el encargado de aportar la fuerza y la precisión.
Un robot colaborativo (también llamado cobot) es aquel que está hecho y programado para ejecutar labores con la ayuda de un colaborador humano. Ambos tienen un rol protagónico en la tarea que efectuaran juntos. El humano por su parte será quien aportará el ingenio, destreza y capacidad de adaptación mientras que el cobot será el encargado de aportar la fuerza y la precisión.

Si te interesa saber mas sobre este tema te invito a ver el siguiente video:
Si te interesa saber mas sobre este tema te invito a ver el siguiente video:
Comentarios
Publicar un comentario